
This errata page is a collection of all bugs and mistakes that I noticed for the first edition. If you would like to propose some corrections please send a note to author@alexanderpeiffer.de.
A special thank you goes to Valentin who found all the bugs in chapter 7 and the legend bug in figure 8.38.
Chapter 1
Page 9 – Equation (1.37) – In the paragraph before I say signal  , thus the equations should be with
, thus the equations should be with
Page 13 – Equation above equation (1.56) – the first integral should read
\Delta E_{\rm cylcle} = \int_0^Tc_v\ddot{u}\,dt=\ldots Page 15 – Figure 1.11 – left spring should have stiffness 
Page 16 – Line below Equation (1.77) – The second frequency should read 
Page 31 – Equation (1.147) – The last fraction should read ![\frac{E^2[fg]}{E[f^2]}](https://docpeiffer.com/wp-content/ql-cache/quicklatex.com-33a1d88b217c1014f39fade63f53ba58_l3.png "Rendered by QuickLaTeX.com")
Page 33
Equation (1.162) – It should be 
The last equation must be similar to equation (1.164), thus  should be in boldsymbol
should be in boldsymbol
Page 34 – Equation (1.167),  should also be in boldsymbol
should also be in boldsymbol
Page 35
Equation (1.173) – The left term should be  instead of
instead of 
Equation (1.177) – The left term should be  instead of
instead of 
Page 38 – Figure 1.24 – To be consistent with the text it should be  and
and 
Chapter 2
Page 44 – Last enumeration – Item 3 should be “The momentum flow out of the volume”
Page 47 – Equation (2.25) – The velocity potential should be 
Page 48 – Equation (2.29) – and consequently … 
Page 53
Table 2.2 – The acoustic velocity formula should read 
Equation (2.59) – The last expression should be 
Page 54
Equation (2.65) – It should read 
The equation reference (2.30) is not correct it should be (2.65)
Page 55
Equation (2.68) – 
Equation (2.69) – 
Page 57
Equation (2.85) – It should by  instead of
instead of 
Equation (2.86) – The time average must be used  instead of
instead of 
Page 58 – Equations (2.87) and (2.88) – Same correction as for equation (2.86)
Page 59 – Equations (2.97) – (2.100) – All  and
and  must be replaced by
must be replaced by  and
and 
Page 60
Equations (2.101) – (2.104) – All , , and
, and  must be replaced by ,
must be replaced by , , and
, and 
Equation (2.101) – In the first line is should read 
Page 62 – Equations (2.116) and (2.117) – The impedance symbols should be boldmath 
Page 58 – Equation (2.98) – This should read 
Page 70 – Above equation (2.155) – It should read  .
.
Chapter 3
Page 76- Equation (3.3) – 
Page 80 – Equation (3.22) – 
Page 84 – Equation (3.39) – First line should read ![dF_x & = [\sigma_{xx}(x+dx)-\sigma_{xx}(x)]dydy](https://docpeiffer.com/wp-content/ql-cache/quicklatex.com-b4c24587b08b04172d20e119a1cf0d6b_l3.png "Rendered by QuickLaTeX.com")
Page 87
Reference above Equation (3.72) – It should be … Equation (3.62) leads to
Equation (3.72) – 
Page 111 – Paragraph below (3.21b) – Insert as first sentence: Considering  as the real and positive solution, hence
as the real and positive solution, hence  .
.
Page 113 – Equations (3.222)-(3.224) – Replace by
Page 114 – Equation (3.225) – Replace by
Page 115
Equation (3.230) – The second term should read 
Equation (3.231) – In the nominator it should read 
Chapter 4
Page 120 Figure 4.1 – The radius is  and not
and not 
Page 135
Figure 4.12 – Missing unit at y-axis label. Use 
Equation (4.76) – It would be more consistent to use  as index in the sum
as index in the sum
\bm{p}(\vec{r}) = \sum_{m=0}^\infty \bm{p}'_m \Phi_m(\bf{r})Equation (4.77) – The first integral should read as follows
\int_{V} \sum_m^\infty\bm{p}_m'\Phi_m(\bf{r}) (\bm{k}^2 - k_n^2) \Phi_n(\bf{r}) dVEquation (4.78) – There must be a  in the sum over .
in the sum over .
Page 136 Equation (4.84) – Remove conjugate star, not required for real modes
Page 137
Paragraph below Equation (4.86) – it should read 
Equation (4.87) – Third term must be 
Page 141 Last paragraph – first element and not fist element
Page 141 Equation (4.103) – For better consistence with Figure 4.16  would be better
would be better
Chapter 5
Page 151 Section 5.3.1 – First sentence – it should be in-homogenous form.
Chapter 6
Page 161 Equation (6.3) – The square should be removed and it should read 
Page 163 Equation (6.12) – The cosine argument must be corrected to 
Page 166
In the first line the formula should read 
Equation 6.21 – The  in the first line should be removed
in the first line should be removed
Page 169
Equations (6.33)-(6.35) – The  factor is missing for all sums.
factor is missing for all sums.
Equations (6.34)-(6.35) – The last  should read
should read 
Page 170
Equations (6.37) – Remove the hat from all pressure symbols  is correct
is correct
Equations (6.38) – Replace  by
by 
Page 175/176 Figure 6.9 and 6.10 – Right hand side. Label of y-axis: should not be boldsymbol
Page 180
Equation (6.63) – The nominator should read
Equation in section 6.4.1.4 –  should not be boldsymbol. However, for figures 6.17 and 6.18 I used equation (3.225)
should not be boldsymbol. However, for figures 6.17 and 6.18 I used equation (3.225)
Section 6.4.2 – It is worth mentioning that the plate is made of aluminum
Figure 6.14 – The density variation in the caption should be 2% not 1%
Page 188
Equation (6.76) – Both upper integral limits must be 
Equation (6.78) – The energy  is missing in the right term
is missing in the right term
Page 192 – Equation below (6.92) – Second sine should include a  and not an
and not an 
Chapter 7
Page 207 Equation (7.18) – The last radiation stiffness should be ![[\bm{D}_{dir}^{(2)}]](https://docpeiffer.com/wp-content/ql-cache/quicklatex.com-1ede037ec08d4a8b2c1dcc4d40111112_l3.png "Rendered by QuickLaTeX.com") instead of
instead of ![[\bm{D}_{dir}^{(3)}]](https://docpeiffer.com/wp-content/ql-cache/quicklatex.com-147e546145d1749d7e0428e029166cb2_l3.png "Rendered by QuickLaTeX.com")
Page 208
Section 7.3.1 heading – Exchange m and n
Globally it would be better to stay with the original heading and exchange and  in the text and all formulas, because his would correspond better to figure 7.5
in the text and all formulas, because his would correspond better to figure 7.5
Equation (7.22) – The index  is missing, it should be
is missing, it should be ![[S_{qq}^{(n)}]](https://docpeiffer.com/wp-content/ql-cache/quicklatex.com-611af09ed0f0b628adfe182280f8ae9f_l3.png "Rendered by QuickLaTeX.com")
Page 210 Equations (7.28) and (7.30) – The index  should be used consequently in all formulas as sum index
should be used consequently in all formulas as sum index
Page 211 Equation (7.32) – The factor  is missing after both large parenthesis
is missing after both large parenthesis
Page 215
Equation (7.40) –  instead of
instead of 
Last line of last paragraph – response instead of reponse
Page 218 Figure 7.13 – The SEA-Matrix must read ![[L']](https://docpeiffer.com/wp-content/ql-cache/quicklatex.com-1f5aefbb9a742741196bb58c7fccee3b_l3.png "Rendered by QuickLaTeX.com") instead of
instead of ![[A]](https://docpeiffer.com/wp-content/ql-cache/quicklatex.com-cbb11a01ded4b80285b12944feeef6fa_l3.png "Rendered by QuickLaTeX.com")
Page 220 Equation (7.47) – The modal coordinate  is missing
is missing
Chapter 8
Page 226 Last paragraph – … is modified by an  factor instead of
factor instead of 
Page 227 First sentence –  must be replaced by
must be replaced by 
Page 231 Figure 8.5 – Label of y-axis: TL/dB instead of TL in dB Page
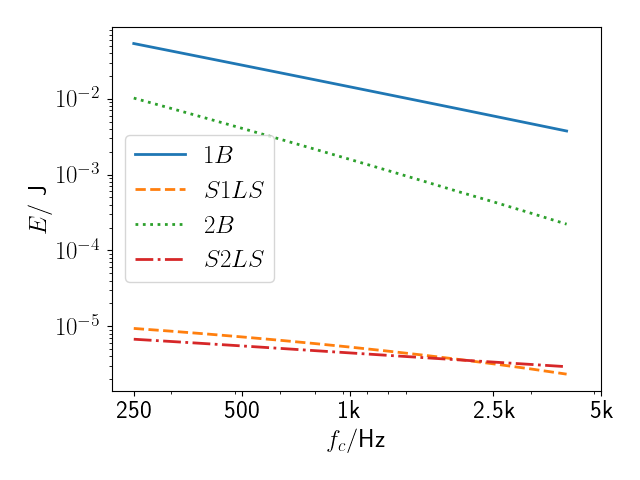
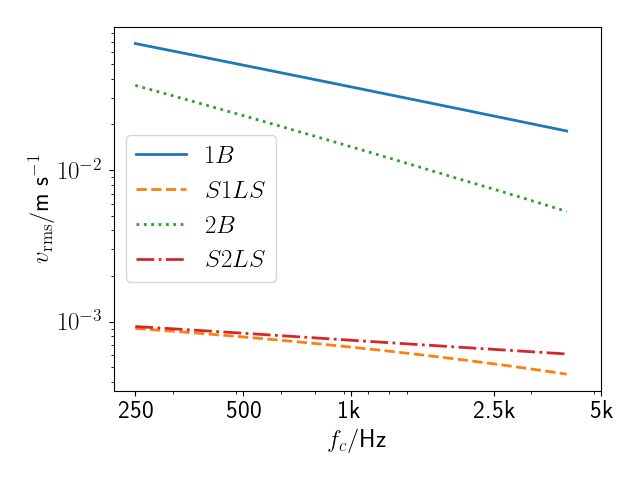
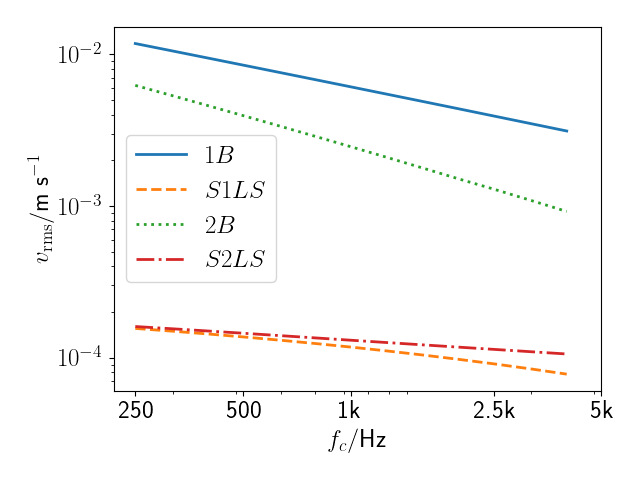
Page 233 Figure 8.8 – Due to a bug in the code spring curves are wrong. See new figure.

Page 234 Figure 8.10 – Label of y-axis: TL/dB instead of TL in dB
Page 238 This item in description –  instead of
instead of 
Page 242 Equation (8.74) – The equal sign before the  must be removed
must be removed
Page 239 Equation (8.51) – in the first row the integral is missing, The second integral runs over 
\Pi = \frac{1}{2} \int_S Re\{ {\bm v}_z^*(x,y){\bm p}(x,y) \} dS Page 240 Equation (8.59) – last sine should read 
Page 245 Equation (8.73) – The stiffness is complex, thus 
Page 247 Equation (8.94) – The stiffness is complex, thus and there is an  missing in the last term
missing in the last term
\bm{D}_{\rm tot}''(k_a,\vartheta)=m''\omega^2\left[\frac{ k_a^4\sin^4\vartheta}{k_B^4} -1 \right]
- j\omega\frac{2 \rho_0c_0}{\cos\vartheta} Page 250
Equation (8.101) – it should read ![\left[\bm{D}_s\right]=-\omega^2\left[M\right]](https://docpeiffer.com/wp-content/ql-cache/quicklatex.com-3abab854d7d15802acc2703fbe0292db_l3.png "Rendered by QuickLaTeX.com")
Equation (8.103) – remove useless  in the middle
in the middle
Page 251 Equation (8.105) – use  and
and 
Page 253 After Equations (8.108a-d) – it should read 
Page 255 Coordinate vector after Equation (8.118) – use bold 
Page 256
Equation (8.121) – the displacement vector is missing after the first matrix
Equation (8.123) – the amplitude vector is missing after the second matrix
Equation (8.124) – the displacement vector is missing after the first matrix,  and
and 
Page 257 Paragraph below Equation (8.127) – it should be  instead of
instead of 
Page 258 Equation (8.131) – is should read 
Page 261
Equation (8.143) – wrong index index in excitation cspd. It should be 
Equation (8.147) – wrong index index in center matrix cspd. It should be  and the third matrix is the hermitian of the inverse
and the third matrix is the hermitian of the inverse ![[\bm{T}_\Psi^{(n)}]^{-H}](https://docpeiffer.com/wp-content/ql-cache/quicklatex.com-68dc7c92cf3374af8ae5fcfeb20a53b1_l3.png "Rendered by QuickLaTeX.com")
Page 263
Figure 8.30 – wavenumber vector labels  and
and  must be exchanged
must be exchanged
Equation (8.151) – is should read 
Page 267 Figure 8.38 – The legends must be exchanged. The blue line belongs to 
Chapter 9
Page 287
Equation (9.76) – Should be 
Paragraph before Equation (9.78) – Should be small 
Page 297 – Equation (9.101) – It should read 
Page 299
Equation (9.107d) – Division by porosity is missing. Use  in nominator
in nominator
Equation (9.107e) – Variables should be in boldsymbol. Use 
Equation (9.107f) – Variables should be in boldsymbol. Use 
Equation (9.107g) – Variables should be in boldsymbol. Use 
Page 301
Equation (9.109) – The last term of the denominator should read 
Equation (9.110) –
{\bm R}(\vartheta)=\frac{{\bm z}(\vartheta)-\frac{{\bm z}_s(\vartheta)}{\cos(\vartheta)}}{{\bm z}(\vartheta)+\frac{{\bm z}_s(\vartheta)}{\cos(\vartheta)}}Page 302
Paragraph below Equation (6.72) – z = ρ0c0
Next paragraph – z = az0
Page 309 Figure 9.40 – Label of y-axis: First ‘perf’ index should be in roman
Page 313 Figure 9.44 – Figure caption has an index error. It should read 
Page 314 Figure 9.45 – Figure caption has an index error. It should read
Page 315 Equation (9.127) – It should read as follows:
m''_{red} = \frac{m_1'' m_2''}{m_1''+m_2''}
Page 316 Figure 9.47 – Wrong figure. Should be as follows:

Chapter 10
Section 10.2.1
I really apologize for all the bugs in this section. This is an excellent example that some mistakes of a derivation are not found, because the final result was know before. In fact all equations of this section are wrong, except the final result!
Page 321
In equation (10.3) the diagonal must be corrected
\omega\begin{bmatrix}
n_1(\eta_{11} + \eta_{12}) & -n_2 \eta_{21}\\
-n_1 \eta_{12} & n_2 (\eta_{22} + \eta_{21})
\end{bmatrix}
\begin{Bmatrix}
E_1/n_1(\omega) \\ E_2/n_2(\omega)
\end{Bmatrix} = \begin{Bmatrix} \Pi_1 \\ \Pi_2 \end{Bmatrix}Page 322
This has consequences on equation (10.4)
\begin{Bmatrix} E_1/n_1 \\ E_2/n_2 \end{Bmatrix}
= -\frac{1}{\omega^2( \eta^2_{12} n_1 - n_2 (\eta_{11}+\eta_{12})(\eta_{22}+\eta_{21})) }
\begin{bmatrix}
\frac{n_2}{n_1}\eta_{22} + \eta_{12} & \eta_{12}\\
\eta_{12} & \eta_{11} + \eta_{12}
\end{bmatrix}
\begin{Bmatrix} \Pi_1 \\ \Pi_2 \end{Bmatrix}and on (10.5)
E_1 = - \frac{n_1\eta_{12} +n_2\eta_{22}}{\omega^2(n_1\eta^2_{12} - n_2(\eta_{11}+\eta_{12})(\eta_{22}+\eta_{21})}\Pi_1 and (10.6)
E_2 = - \frac{n_2\eta_{12} }{\omega^2(n_1\eta^2_{12} - n_2 (\eta_{11}+\eta_{12})(\eta_{22}+\eta_{21})}\Pi_1Not to speak about (10.7) and (10.8)
p_{1,\rm rms} = -\frac{\rho_0}{2\pi^2c_0 n_1}
\frac{n_1\eta_{12} +n_2\eta_{22}}{n_1\eta^2_{12} - n_2 (\eta_{11}+\eta_{12})(\eta_{22}+\eta_{21})}\Pi_1p_{2,\rm rms} = -\frac{\rho_0}{2\pi^2c_0}
\frac{\eta_{12} }{n_1\eta^2_{12} - n_2 (\eta_{11}+\eta_{12})(\eta_{22}+\eta_{21})}\Pi_1The pressure ratio (10.9) also has totally different look
\frac{p^2_{2,\rm rms}}{p^2_{1,\rm rms}} = \frac{n_1(\omega)\eta_{12}}{n_1(\omega)\eta_{12}+n_2(\omega)\eta_{22})}Leaving different result for the coupling loss factor in equation (10.10). Note the involved ratio of modal densities.
\eta_{12} = \frac{p^2_{2,\rm rms}}{p^2_{1,\rm rms}}\frac{n_2(\omega)}{n_1(\omega)\left(1-\frac{p^2_{2,\rm rms}}{p^2_{1,\rm rms}}\right)} \approx \eta_{22}\frac{p^2_{2,\rm rms}}{p^2_{1,\rm rms}}\frac{n_2(\omega)}{n_1(\omega)}To be precise, the volume in equation (10.11) is 
\eta_{22} = \frac{A_s c_0}{4 V_2 \omega}Page 323
The volume in the  –
– relationship must be
relationship must be  and this – in combination with the modal density ratios – gives the final result in equation (10.12).
and this – in combination with the modal density ratios – gives the final result in equation (10.12).
\left<\tau_{12}\right> = \frac{4 V_1 \omega}{c_0 S_j} \eta_{12} = \frac{p^2_{2,\rm rms}}{p^2_{1,\rm rms}}\frac{V_1 n_2(\omega)}{V_2 n_1(\omega)} \frac{A_s}{S_j}
= \frac{p^2_{2,\rm rms}}{p^2_{1,\rm rms}}\frac{A_s}{S_j}Page 325 Figure 10.4 – Label at y-axis should be
Page 327
Figure 10.7 and 10.8 are not correct due to a bug in the pyva software
Page 328 Figure 10.9 is not correct due to a bug in the pyva software
Chapter 12
Page 361 Figure 12.1 – The Helmholtz number should be 
Page 372 – Section 12.3 Last sentence of first paragraph – prototype instead of pototype.
Appendix A
Page 424 Equations (A.68),(A.70)-(A.73) – The force symbol should be in capital letters 
Appendix B
Page 426 Equation (B.17) – The upper index should read 
Page 429 Figure B.2 – wavenumber vector labels and must be exchanged
Page 434 Equations (B.65) and (B.66) – It shall read  instead of
instead of 
Page 435 Paragraph below equation (B.73) – it should read “only  remains real …”
remains real …”
Page 436 Equations (B.79-80) – The upper right coefficient in the matrix requires a second right parenthesis
Index
Page 445 coupling loss factor, non-resonant and resonant instead of resonsant